|
Recent years have witnessed growing interest in the use of underwater acoustic
networks (UWANs) in many applications. Examples of these applications include
environmental state monitoring, oceanic profile measurements, leak detection in
oil fields, distributed surveillance, and navigation, etc. For these
applications, a set of nodes are employed to collaboratively monitor an area of
interest and track certain events or phenomena. In addition, it is common to
find autonomous underwater vehicles (AUVs) acting as mobile sensor nodes that
perform search-and-rescue missions, reconnaissance in combat zones and coastal
patrol. These AUVs are to work cooperatively to achieve a desired goal and thus
need to be able to, in an ad-hoc manner, establish and sustain communication
links in order to ensure some desired level of quality of service (QoS).
Therefore, each node is required to adapt to environmental changes and be able
to overcome broken communication links caused by external noise affecting the
communication channel and due to node mobility. In addition, since radio waves
tend to get absorbed in the water, it is common for most underwater applications
to rely on acoustic rather than radio channels for long range communications.
However, acoustic channels pose multiple |
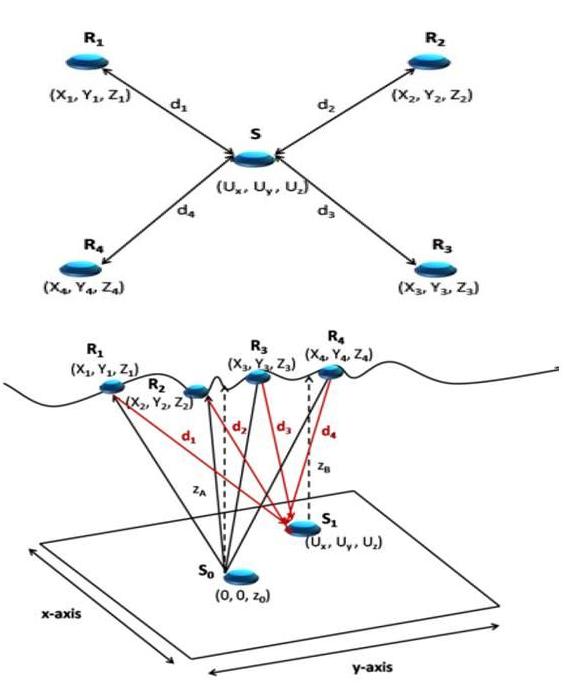 Illustrating the SBR-based localization, where
node S0 uses intersection points {R1, R2, R3,
R4} on the surface to solve for the position of S1.
Illustrating the SBR-based localization, where
node S0 uses intersection points {R1, R2, R3,
R4} on the surface to solve for the position of S1.
|
|
challenging issues, most notably the high transmission delay due to slow
signal propagation
and the limited channel bandwidth due to
high frequency attenuation. Furthermore, the inhomogeneous property of the water medium affects the sound speed profile
while the signal surface and bottom reflections leads to multipath effects. To address these networking challenges,
our research focus is geared towards establishing networking protocols that take into consideration the underwater physical layer dynamics.
|
|
Ongoing Research
|
To overcome these issues, we have developed a novel surface-based reflection (SBR) scheme,
which uses the reflections from the water surface, and bottom, to establish signal-reflected or
non-line-of-sight (NLOS) communication links. SBR is used to incorporate both line-of-sight (LOS)
and NLOS links by utilizing directional antennas, which will boost the signal-to-noise ratio (SNR)
at the receiver while promoting NLOS usage. We employ a directional underwater acoustic antenna
which is composed of an array of hydrophones that can be summed up at various phases and amplitudes
resulting in a beam-former. With SBR, the receiver only accepts signals that are reflected at the surface
(or bottom) by checking the Received Signal Strength (RSS) and comparing it to the calculated reflection coefficients.
This is done by applying a homomorphic deconvolution process to the received signal to obtain the impulse response
of the acoustic channel containing the RSS information. Our on-going research is exploiting this SBR communication
model to develop an effective and practical design solution for UWANs. A suite of protocols are to being developed for:
- Node discovery and localization in order to establish a coordinate system relative to the water surface (see illustration).
The process is fully a distributed in which each node will use the SBR-based range measurements to its neighbors to accurately
determine their relative position.
-
Medium access control to take advantage of the multipath reflections in the underwater environment and overcome the unavailability and limitations of line-of-sight (LOS) paths. This not only allows the network to fully utilize the spatial spectrum but also boosts the overall network throughput by increasing the simultaneity of the transmissions and reducing collisions and delays.
-
Routing unicast and geocast in order to achieve low latency and robust dissemination of data among the nodes without the reliance on surface nodes or centralized control.
|
|
Sponsor
|
|
National Science Foundation
|
|
Recent Publication
|
- L. Emokpae and M. Younis, Throughput Analysis for Shallow Water Communication Utilizing Directional Antennas, IEEE Journal on Special Topics in Communications, Special Issue on Communications Challenges and Dynamics for Unmanned Autonomous Vehicles, Vol. 30, No. 5, pp.1006 1018, June 2012.
- L. Emokpae and M. Younis, "Reflection-enabled Directional MAC Protocol for Underwater Sensor Networks", IEEE/IFIP Wireless Days Conference (WD'11), Niagara Falls, Canada, October 2011.
- L. Emokpae and M. Younis, "Surface Based Anchor-free Localization Algorithm for Underwater Sensor Networks", IEEE International Conference on Communications (ICC'11), Kyoto, Japan, June 2011.
- L. Emokpae and M. Younis, "Surface Based Underwater Communications", IEEE Global Communications Conference(GLOBECOM'10), Miami, FL, December 2010.
|






